飞行器遥操作与维修维护仿真系统
本系统是基于分布式仿真技术和遥操作技术的虚拟装配维修系统解决方案,系统采用虚拟仿真技术、遥操作技术、虚拟装配维修技术,模拟真实的太空飞行器的工作过程,并在此基础上实现对太空飞行器的装配验证和遥操作维修演练,如空间站、卫星等。系统支持单机维修模式,也支持多人协同维修维护模式。同时,系统模块可根据真实的星系坐标模拟三维星系统空间,包括太阳、月亮、地球等重要天体和星空星系太空环境。最终呈现一个以真实空间数据为基础的飞行器设计验证和维修维护虚拟仿真演练环境,为科学研究与和空间飞行器的维修维护提供技术支撑。
多视角呈现
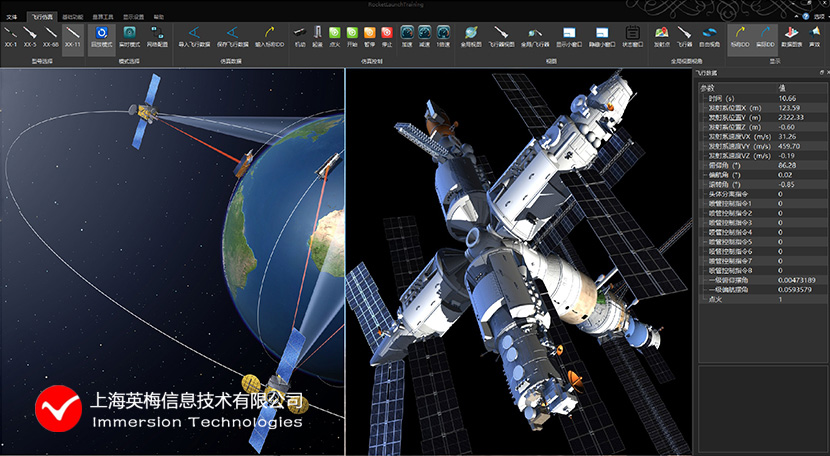
系统内置了可自定义的三维相机编辑模块,用户可根据需要,从不同的视角(第一人称视角或第三人称视角)设置一个或多个固定相机或跟随相机,系统可从不同视角、不同位置以画中画的形式显示飞行器的实时状态(如右图),同时支持静态视点、运动跟随视点、全局视点、局部视点和不同视点场景的实时切换功能。
交汇对接与装配维修虚拟仿真训练演练
系统支持实时交互功能,系统内置一个满足地理场景用户基本需求的实时仿真交互浏览模块,其中包括漫游、驾驶、行走、飞行等场景浏览交互方式,用户可以根据需要选择不同的浏览方式。也可以根据需要配置演示视点,然后可通过鼠标拖拽的方式,可任意旋转改变视角进行交互浏览,同时支持仿真过程的暂停、回放、视角切换切换等交互功能,也可以进行视点缩放(拉近拉远)、平移、旋转等交互。
系统内置功能强大的“多维交互模块”,该交互模块不仅内置多维交互算法和交互能力,而且可实时连接多种VR交互设备和装置,如:键盘鼠标、数据手套、计算机力和触觉反馈系统、6自由度位置追踪交互系统、三维鼠标(轨迹球)等,用户可以根据教学实训需求任意选择合适的交互设备,快速进行虚拟拆装实验和仿真实训。
利用虚拟仿真实训模块,用户可按照维护指南上的“标准拆装流程”,模拟拆装操作和维修维护训练,包括:总成的拆装过程、零部件拆卸、更换与安装过程、工具选择与使用、工艺处理和零部件测量。
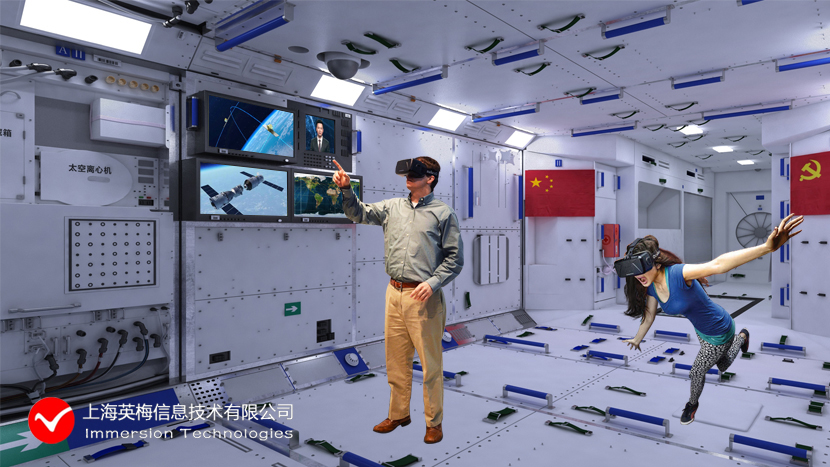
对于一些特定的部件和区域,往往需要多人协同操作,同时,不同的操作人员之间需要相互沟通、交流和指导,系统内置的多人协同维修和拆装演练功能模块,可支持多人协同仿真训练。如:用户每人可佩戴“头戴式显示器(VR眼镜系统)”,在大型位置追踪系统的辅助下实现多人协同交互和仿真实训。
每一个参与人员分工作业,各司其职、互动演练。参与人员可以在一个局域网内、也可以在互联网环境下,随时随地、不受时空限制地在“同一个场景中共同完成一个虚拟拆装和维修维护的仿真演练”。
仿真数据接口模块
内置坐标变换算法和位置、姿态、速度等仿真驱动数据接口模块。通过通信协议(UDP协议),可以将仿真计算机得到的仿真数据通过网络实时传给视景计算机,经过数据的变换解算后实时驱动飞行器的发射、升空、飞行、分离、回收等,同时实现姿态(包括位置、速度、姿态角度和角速度等)控制与实时仿真。同时包括由动力学模型生产的实时数据同步驱动机制,如塔架模型的收放、飞行器的动力学部件实时运动控制仿真等。