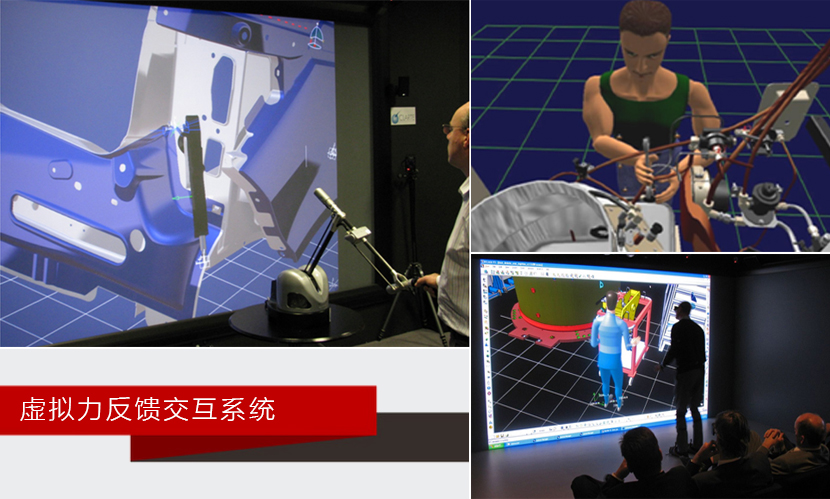
虚拟力反馈交互系统
为用户提供除了视觉、听觉之外的第三感觉——触觉和力感
计算机虚拟力和触觉反馈设备能为虚拟仿真用户提供除了视觉、听觉之外的第三感觉——触觉和力感,参与者利用它可获得高度逼真的三维力(触觉)反馈能力,从而真正体会到虚拟现实人机交互的真实感,他们是一种真实的人机交互接口,让虚拟仿真用户真正感觉虚拟世界的真实存在,从而大大增强身临其境的人机交互虚拟现实体验。
作为一种高精度的力反馈触觉交互设备,它可以提供非常精确的计算机力和触觉反馈功能,以及6自由度的虚拟现实交互能力。应用中,虚拟仿真用户能够感觉到交互过程中的摩擦力、反作用力及力矩的存在。该设备提供了3个平移自由度的力反馈,其运动范围基本与肘部不动时前臂的运动范围相当。另外,该设备还通过一个主动万向节为操作者提供了3个旋转自由度(倾斜、滚动和翻转)的力矩反馈。
虚拟现实触觉与力反馈系统典型应用领域:先进制造、虚拟装配与设计验证、虚拟维修、生物医学(虚拟手术)、纳米操控、自动化与遥距操作、3D 设计/工程学、人工智能、地球物理学、心理学研究。
Haption虚拟现实力反馈系统技术性能特点
- 6自由度交互和6自由度力和触觉反馈功能;
- 交互范围支持:胳膊弯曲和上肢运动;
- 反馈力方向:x, y, z, Tx, Ty, Tz;
- 平移空间范围:1010 x 1330 x 940 mm;
- 旋转空间范围:330x130x270°;
- 平移力输出: 34 N(最大)/9.5 N(连续);
- 旋转力输出: 3.1 Nm(最大)/1 Nm(连续);
- 平移精度:0.016 mm;
- 旋转精度:0.003 °;
- 静态自重补偿与平衡机制;
- 电源;100-240 VAC 50/60Hz;
- 接口:Ethernet(RJ-45);
- 支持Ethernet/UDP通讯协议
- 可编程控制的交互式手柄适配器;
- 配套二次开发接口(API),支持主流操作系统;
- 碰撞检测与物理属性开发包(SDK);
- Catia V5力反馈实时交互接口插件模块;
- Catia V5 力反馈人体行为扩展交互模块;
- 人机功效力反馈仿真接口模块;
可支持软件接入应用
Unity3D、3DExperience、Catia & Delmia V5, Solidworks、Siemens Tecnomatix & Classic Jack、Python、Worldviz Vizard、ROS、CHAI3D、ODE、 Matlab Simulink、Nvidia Flex.