VR Catcher虚拟装配软件平台是一套沉浸式人机交互和虚拟装配解决方案,方案可以帮助工程师和实训人员在身临其境的虚拟现实环境中准确地进行“设计合理性仿真验证”和“虚拟装配训练”,包括结构完整性、安全性、机械系统动力学仿真以及动态机械过程的仿真验证和虚拟装配过程演练。
VR Catcher功能和性能
- 支持海量三维CAD数据的实时渲染和显示;
- 支持实时机械装备实时虚拟装配;
- 支持Pro/E、SolidWorks、UG、CATIA V5等主流CAD软件模型导入;
- 支持虚拟外设实时进行虚拟装配(包括数据手套、位置跟踪器);
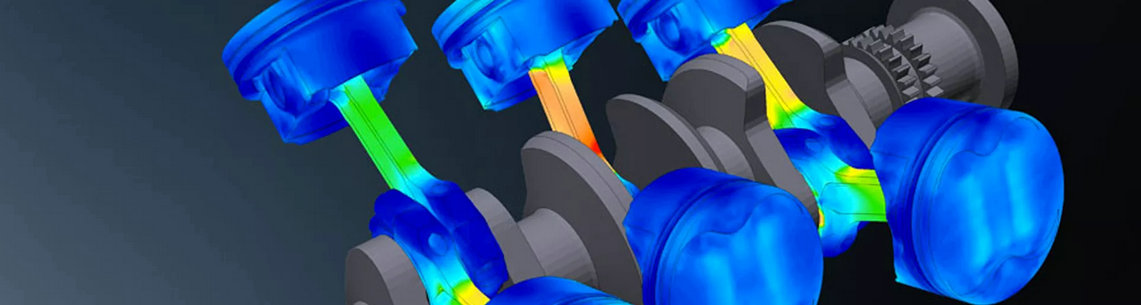
- 支持机构动力学与动态仿真,再现机械装备的工作原理和运动过程;
- 支持沉浸式立体显示和桌面虚拟装配应用;支持多通道同步集群渲染;
- 支持计算机力反馈与触觉仿真,并支持力和触觉仿真设备接入与实时装配应用。
- 支持重力、碰撞检测等物理属性仿真
- 支持多视窗坐定视图和定位,支持装备零部件的装配关系和属性定义
- 3D场景模型编辑:支持场景创建、3D模型编辑、纹理编辑、灯光处理、动画(动作)设计、渲染和共享等功能,支持布尔运算、挤压、沿路径移动、相机动画、剖面显示;